전원에 대하여
| 교류 (AC : Alternating Current) |
- 교류는 +극과 -극이 일정시간에 따라 크기와 방향이 주기적으로 변하는 전류를 교류 라고한다. 사인파형이 가장 전형적인 교류이다. |
|---|---|
| 직류 (DC :Direct Current) |
- 직류는 전지와 같이 +극과 -극이 항상 일정한 전류로써 시간에 따라 방향 및 크기가 변하지 않습니다. - DC 전원장치로서는 건전지, 축전지, 직류발전기 등이 있습니다. |
| 주파수 Frequency |
- 주파수는 교류가 1초간에 반복한 주기의 수입니다. - 단위는 HERTZ(Hz)로 나타냅니다. - 우리 나라에서는 60Hz의 주파수가 표준으로 채용되고 있으며, 이것은 1초간에 60회의 전압과 전류가 +에서 -로 변한다. |
정격
- MOTOR에 정해진 사용 조건에 적합하도록 설계되어있는 것으로 그 사용 조건에 맞았을 때의 사용 한도를 정격이라고합니다.
- 출력에 대한 사용 한도를 정하는 등 전압, 전류, 회전수, 주파수 등을 지정합니다. 그것을 정격출력, 정격전압, 정격전류, 정격회전수, 정격주파수 라고 합니다.
- 출력에 대한 사용 한도를 정하는 등 전압, 전정격에는 연속정격, 단시간정격, 반복정격 등이 있으며, 당사에서 생산되는 INDUCTION MOTOR는 연속정격이며, REVERSIBLE MOTOR는 단시간(30분) 정격입니다.
| 연속 정격 | - 지정된 조건에서 사용 할 때 규정된 온도상승과 제반 조건을 초과하지 않고 연속 사용 가능한 것을 연속정격이라고 합니다. 대표적으로 INDUCTION MOTOR가 여기에 속합니다. |
|---|---|
| 단시간 정격 |
- 지정된 조건으로 규정된 시간 동안 운전 할 때에 규정된 온도 상승 등 제반 조건으로 초과하지 않고 사용하는 것을 단시간 정격이라고 합니다. 단시간 정격은 5분, 10분, 15분, 30분, 1시간, 2시간의 6가지를 표준으로 합니다. |
| 반복 정격 | - 지정된 조건에서 사용 할 때 일정한 부하로 운전과 정지를 주기적으로 반복 사용할 때에 규정된 온도 상승 등 기타의 제반 조건을 초과하지 않는 정격입니다. |
출력
- MOTOR가 단위 시간에 할 수 있는 일을 나타내며 회전수와 힘(TORQUE)을 곱한 값으로 결정됩니다. 정격 출력 값을 MOTOR에 표시합니다.
| 출력 = 1.027 x T x N [WATTS] |
|---|
- 1.027 : 정수, T : TORQUE(kg·m), N : 회전수(rpm)
- 1마력(HP)은 746 [WATTS]입니다.
- 정격출력 : 지정된 전압, 주파수의 조건에서 연속적으로 발생되는 출력을 말합니다. 이때의 정격출력을 일반적으로 MOTOR의 출력이라고 합니다.
TOROUE와 회전수
- MOTOR 의 TORQUE란 회전체를 돌리기 위한 회전력으로서 그 단위는 [g·cm]또는 [kg·cm]가 사용됩니다. 나라별로 [N·m], [oz·in], [lb·in]를 사용합니다.
| [1kg·cm = 0.0981 N·m = 98.1 mN·m = 13.9oz·in = 0.868 lb·in] |
|---|
- 1kg·cm의 TORQUE라는 것은 회전체의 반경이 1cm인 외주의 한 점에서 직각 방향으로 1kg의 힘을 가한 경우의 회전력입니다.
 |
|---|
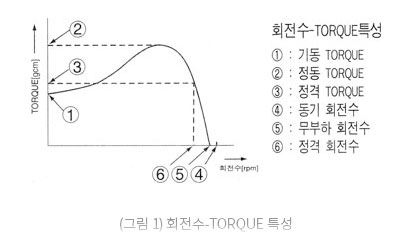
기동 Torque (그림의 1의 ①)
- MOTOR가 기동할 때 발생되는 회전력으로 회전자 구속 회전력(LOCKED ROTOR TORQUE)라고도 하며, 시동 TORQUE 라고도 합니다.
- 이 회전력보다 큰 힘을 MOTOR에 가하면 MOTOR는 회전되지 않습니다.
정동 Torque (그림의 1의 ②)
- MOTOR의 최대 TORQUE를 정동 TORQUE라고 합니다.
- 운전중에 최대 TORQUE 이상의 부하가 걸리면 MOTOR는 정지됩니다.
정동 Torque (그림의 1의 ③)
- MOTOR가 정격 회전수 일때의 TORQUE 입니다.
- MOTOR에 정격 전압을 가해 정격 출력을 연속적으로 낼 때의 TORQUE를 말합니다.
동기 회전수 (그림의 1의 ④)
- 전원 주파수와 MOTOR의 극수로 결정되어지는 회전수입니다.
 |
|---|
Ns : 동기 회전수[rpm]
P : MOTOR의 극수
f : 전원 주파수 [Hz]
120 : 정수
rpm : 1분당 회전수 (REVOLUTION PER MINUTE)
 |
|---|
 |
|---|
무부하 회전수 (그림의 1의 ⑤)
- MOTOR 출력 축에 아무것도 걸지 않고 MOTOR를 회전시켰을 때의 회전수로 INDUCTION MOTOR나, REVERSIBLEMOTOR에서는 동기 회전수보다 약 20~80[rpm] 정도 낮게 회전됩니다.
정격 회전수 (그림의 1의 ⑥)
- MOTOR 에 정격 부하를 걸고 정격 출력을 낼 때의 회전수로 사용상 가장 이상적인 회전수입니다.
SLIP
- 회전수를 다른 방법으로 표현하는 것이며 다음 식으로 표시합니다.
 |
|---|
Ns : 동기 회전수 [rpm]
N: 임의 부하시 회전수 [rpm]
S: SLIP
 |
|---|
정마찰 Torque
전자 BRAKE가 정지하고 있는 상태에서 부하를 HOLDING 하고 있는 TORQUE입니다.
허용 Torque
MOTOR 를 운전할 때에 사용할 수 있는 최대의 TORQUE를 말합니다. MOTOR의 정격 TORQUE, 온도상승, 조합하는 GEAR HEAD의 강도에 의해 제한됩니다.
Over Run
전원을 차단한 순간부터 정지하기까지 MOTOR의 초과회전을 각도(회전수)로 나타낸 것입니다.
Gear head
| 감속비 | GEAR HEAD가 MOTOR의 회전수를 감속하는 비율입니다. MOTOR회전수가 GEAR HEAD 출력 축에서는 (1/감속비) 이 됩니다. GEAR HEAD감속비에는 50Hz, 60Hz에서의 MOTOR회전수의 차이에 대응하여 GEAR HEAD의 출력축의 회전수를 동일하게 하기 위하여 3, 5, 7.5, 12.5, 15.....의 계열과 그 1.2배의 감속비인 3.6, 6, 9, 15, 18..... 의 계열이 있습니다. 50Hz 지역에서 감속비 3인 경우와 60Hz 지역에서 감속비 3.6은 GEARHEAD 출력축 회전수가 거의 동일합니다. 물론 50Hz지역이나, 60Hz지역이나 모든 GEAR HEAD를 사용할 수 있습니다. |
|---|---|
| 최대 허용 Torque |
GEAR HEAD에 걸리는 최대의 부하 TORQUE입니다. GEARHEAD에 사용하고 있는 치차, 축수의 재질, 크기 등의 기계적 강도에 의해 정해지므로 GEARHEAD의 종류, 감속비에 따라 달라집니다. |
| Service Factor |
GEAR HEAD의 수명을 추정할 때 사용하는 계수입니다. 부하의 종류와 사용 조건에 대하여 수명시험 등에 의하여 경험적으로 결정하는 수치입니다. |
| 전달 효율 |
MOTOR에 GEAR HEAD를 접속하여 TORQUE를 증폭시킬 때의 효율로서 %로 표시합니다. GEAR HEAD에 사용하고 있는 축수, 치차의 마찰 및 윤활유의 저항 등으로 결정됩니다. 전달 효율을 GEAR HEAD 감속단수 1단당 대략 90%로 되어 2단은 81%이며, 감속비가 커지면 감속단수가 증가되어 3단의 전달효율은 73%, 4단의 전달효율은 66%, 5단의 전달 효율은 59%로 저하됩니다. |
| Over Hung 하중 |
GEAR HEAD 출력 축에 직각 방향으로 걸리는 하중입니다. GEAR HEAD에 걸리는 OVERHUNG 하중의 최대치를 허용 OVER HUNG 하중이라고 하고, GEAR HEAD의 종류 및 SHAFT 선단에서의 거리에 따라 달라집니다. BELT 구동일 때의 장력 등이 이것에 해당합니다. |
| Thrust 하중 |
GEAR HEAD 출력 축에 축방향으로 걸리는 하중입니다. GEAR HEAD에 걸리는 THRUST 하중의 최대치를 허용 THRUST 하중이라고 하고, GEAR HEAD의 종류에 따라 달라집니다. |